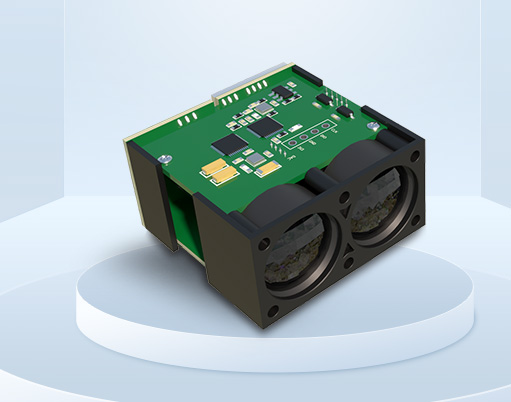
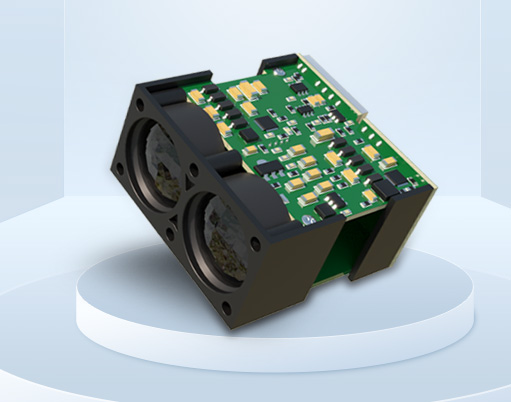
Laser ranging sensor is a sensor that uses laser to accurately measure the distance of a target. Its working principle is mainly based on the characteristics of laser (strong directionality, good monochromaticity, energy concentration) and different ranging methods. Common principles include the following categories:
1、 Time of Flight (ToF)
Core principle
Calculate the distance to the target by measuring the time difference between laser emission and reception after reflection by the target. The formula is:
Distance=(speed of light x flight time)/2 (divided by 2 because the laser needs to travel back and forth to the target).
Subdivision type
脉冲 ToF(Pulsed ToF)
Working mode: emitting short pulse laser (nanosecond level), detecting reflected pulses at the receiving end, and calculating flight time through timestamps.
Features: Suitable for long-distance measurement (up to several kilometers), strong resistance to environmental light interference, but accuracy is limited by time measurement resolution (usually ± 10cm~± 1m).
Applications: Vehicle mounted LiDAR (such as Velodyne), drone obstacle avoidance, building surveying.
Phase Shift ToF method
Working mode: Transmit continuously modulated laser (such as sine wave modulation), and calculate the distance by measuring the phase difference between the emitted light and the reflected light.
Formula:
Distance=(speed of light x phase difference)/(4 π x modulation frequency)
Features: High accuracy (up to ± 1mm), but shorter measurement range than pulse ToF (usually<100 meters), suitable for precise measurement of medium to short distances.
Applications: Mobile LiDAR (such as iPhone Pro), robotic vacuum cleaner ranging, industrial parts size detection.
2、 Triangulation method
Core principle
Using geometric trigonometric relationships to calculate distance: The laser emitter emits a beam at a fixed angle, and the reflected light from the target is received by a receiver (such as CCD/CMOS). The distance is calculated based on the position change of the light spot on the receiver.
workflow
The laser emitter emits a beam of laser light, which is directed onto the target object to form a light spot;
The receiver and transmitter form a fixed angle and receive the reflected light spot;
Calculate the distance based on the position of the light spot on the receiver (such as pixel coordinates) using a triangular geometric relationship:
Distance=baseline length x focal length/spot offset
The baseline length is the distance between the transmitter and receiver, and the focal length is the focal length of the receiver lens.
characteristics and application
Accuracy: It can reach micrometer level (± 1 μ m~± 100 μ m), but the measurement range is relatively short (usually<1 meter), suitable for close range precision detection.
Scenario: Scanning the surface contour of industrial parts, measuring the warpage of PCB boards, and monitoring the layer thickness of 3D printing.
3、 Interference measurement method
Core principle
The use of laser coherence to calculate distance by observing the interference fringes between the emitted light and the reference light is a measurement method with nanometer level accuracy.
subdivision technology
Michelson interferometry
Principle: The laser beam is split into two beams by a beam splitter. One beam is reflected by the target (measuring arm), and the other beam is reflected by a fixed mirror (reference arm). The two beams interfere to form fringes, and the distance change is calculated based on the movement of the fringes.
Application: Measurement of semiconductor wafer thickness, detection of surface flatness of optical components.
White light interferometry
Principle: By utilizing the low coherence of a white light source, clear interference fringes are only generated when the optical path difference between the measuring arm and the reference arm is close to zero, and the target position is determined by scanning the optical path difference.
Features: Suitable for measuring rough surfaces or multi-layer structures, with an accuracy of nanometer level (± 1nm).
Application: Surface morphology analysis of MEMS devices, measurement of magnetic head slider height.
4、 Spectral Confocal Method
Core principle
By utilizing the different focal lengths of lasers with different wavelengths in the lens, the target distance is determined through spectral analysis
White light (multi wavelength laser) is focused by an objective lens, and different wavelengths of light are focused at different depths;
The reflected light from the target returns through the same objective lens, and the wavelength of the reflected light is analyzed by a spectrometer to determine the focal point position (i.e. distance).
characteristics and application
Accuracy: Sub micron level (± 0.1 μ m~± 1 μ m), suitable for measuring transparent or reflective surfaces (such as glass and metal).
Scenario: Thickness detection of lithium battery electrodes, measurement of glass curvature on mobile phone screens, and monitoring of biological cell size.
5、 Frequency Modulated Continuous Wave (FMCW) method
Core principle
A continuous laser (tuned wave) with a linear change in emission frequency over time, and the distance is calculated by measuring the frequency difference between the emitted wave and the reflected wave:
The frequency difference is directly proportional to the flight time, and can be converted into distance by combining it with the frequency modulation slope.
characteristics and application
Advantages: It combines the long-distance (kilometer level) of ToF with the high-precision (± 1cm) of phase method, and has strong anti-interference ability.
Scenarios: Aerospace ranging (such as satellite laser altimetry), high-end industrial radar, autonomous driving (the future development direction of solid-state LiDAR).


European Office:
line centura nr 20 smoked by the Jews of Rome. NIA POST CODE 077010
Southeast Asia Office:
Thailand:48/14 Soi Roong Ruang, Ratchapisek Road,Samsen Nok Sub-district, Huai Khwang DistrictBangkok 10310 Singapore:18 Boon Lay Way,TradeHub 2l#07-132,Singapore 609966
Company address:
Sat Dascälu, Comuna Dascälu, Strada CÃMPINA Nr. 3, CAMERA Nr. 3, Judet llfov




Contact us feel free to call or write anytime, We will call you back soon!