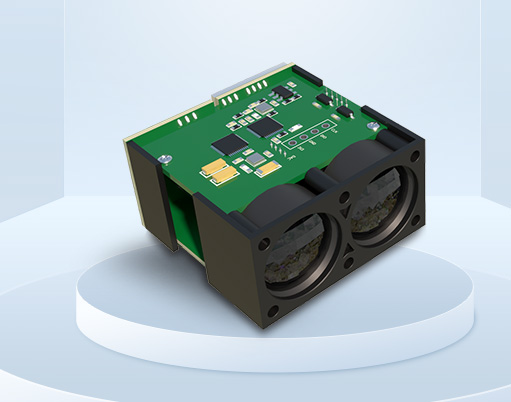
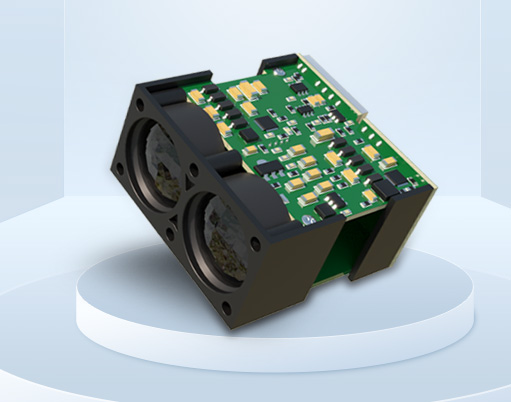
The laser radar in the autonomous vehicle integrates technologies in optics, electronics, machinery and other fields, and its key technologies directly affect the accuracy and reliability of environmental perception. The following is the analysis of core technologies:
1、 Scanning technology: determining environmental coverage and real-time performance
1. Mechanical scanning technology
Principle: By using mechanical rotating components such as rotating prisms and galvanometers, a 360 ° scan of the laser beam is achieved to generate a three-dimensional point cloud.
Features: Mature technology, wide scanning range (such as 120 ° vertical field of view), high point cloud density, but mechanical structure is prone to wear and tear, large volume, and high cost (early single unit cost exceeded $10000).
Application: Early Robotaxis (such as Waymo's first generation models) and some high-end test vehicles.
2. Solid state scanning technology
MEMS galvanometer technology
Principle: Using a microelectromechanical system to drive a small-sized galvanometer to deflect a laser beam, achieving two-dimensional scanning.
Features: No mechanical rotating parts, small size (such as the size of a coin), low cost (in the thousands of yuan range), but limited scanning angle (about ± 15 ° vertical field of view), weak anti vibration performance.
OPA optical phased array technology
Principle: By controlling the phase difference of multiple laser beams and utilizing interference effects, electronic scanning of the beams is achieved without physical moving parts.
Features: The highest degree of solidification, response speed in nanoseconds, suitable for automotive grade reliability requirements, but with high technical difficulty, low energy efficiency, and a short detection distance (<100 meters).
Flash array technology
Principle: No scanning is required, the laser surface light source is directly emitted, and the detector captures the three-dimensional information of the entire field of view at once.
Features: Simple structure, low cost, fast response speed, but low point cloud density (insufficient resolution at long distances), limited detection range (usually<50 meters), suitable for close range blind correction.
2、 Laser emission and reception technology: improving detection distance and accuracy
1. Laser emission technology
Wavelength selection
905nm wavelength: early mainstream (such as Velodyne products), low detector cost, but poor safety for human eyes (power limitation required), detection distance of about 100 meters.
1550nm wavelength: high human eye safety threshold (power can be increased by 10 times), detection range of over 200 meters (such as Luminar products), but requires the use of indium gallium arsenide (InGaAs) detectors, which are costly.
pulse modulation
ToF (Time of Flight) technology: calculates distance by measuring the round-trip time of laser pulses with centimeter level accuracy, suitable for long-distance detection.
FMCW (Frequency Modulated Continuous Wave) technology: By emitting frequency modulated laser and analyzing the frequency offset of the echo to calculate distance, it has strong anti-interference ability and can simultaneously obtain velocity information (Doppler effect), but the system complexity is high.
2. Signal reception technology
APD (Avalanche Photodiode): High sensitivity, suitable for detecting weak light signals, commonly used in 905nm laser radar.
SPAD (Single Photon Avalanche Diode): With single photon level detection capability, it can be used for long-range weak signal reception and may become a core component of solid-state radar in the future.
3、 Point cloud processing and algorithm optimization: improving environmental understanding efficiency
1. Point cloud denoising and enhancement
By using filtering algorithms such as voxel filtering and statistical outlier filtering, environmental noise (such as rain, snow, and dust interference) is removed to preserve effective target point clouds.
Using deep learning techniques such as PointNet to upsample sparse point clouds and improve the integrity of obstacle contours (such as distinguishing pedestrians from pillars).
2. Real time Localization and Mapping (SLAM)
By combining laser point cloud with IMU (Inertial Measurement Unit), GPS and other data, real-time vehicle positioning (centimeter level accuracy) is achieved, and high-precision maps are dynamically updated (such as annotating road potholes and traffic sign locations).
3. Multi sensor fusion algorithm
Integrating LiDAR point clouds with camera images and millimeter wave radar data (such as BEV bird's-eye view algorithm) to compensate for the shortcomings of a single sensor:
The camera provides color and semantic information (such as traffic light status), the laser radar supplements the three-dimensional structure, and the millimeter wave radar maintains detection capability in rainy and foggy days.
4、 Vehicle grade reliability technology: adapted to complex in vehicle environments
1. Environmental adaptability design
Temperature range: Meet the working temperature range of -40 ℃~85 ℃ (as per Huawei MDC platform testing standards), and avoid overheating of the laser emitter through thermoelectric separation design.
Anti vibration/impact: Reduce mechanical component wear through solid-state structures (such as OPA, Flash), or use reinforced mechanical structures (such as the Hesai Pandar series passing 100G impact testing).
Waterproof and dustproof: up to IP6K9K rating, preventing rainwater and mud from entering the optical lens.
2. Functional safety design
Following the ISO 26262 functional safety standard, redundant design (such as dual laser emitters and independent power supply modules) is adopted to ensure that single point failures do not affect system safety.
Built in self checking function (such as laser power monitoring, detector fault detection), providing real-time feedback on the system's health status.
5、 Cost control technology: promoting large-scale application
1. Integration and mass production process
Adopting chip based design (such as integrating laser emission, reception, and signal processing into ASIC chips) to reduce hardware costs (such as DJI Livox reducing radar costs to the thousand yuan level through a mirror+chip solution).
Introducing consumer electronics mass production processes (such as PCB board placement and automated assembly) to replace traditional manual debugging and improve yield (from 60% to over 95%).
2. Optical scheme optimization
By integrating optical components such as fiber optic arrays and micro lens arrays, the volume and cost of laser emission modules can be reduced while improving beam uniformity.
Summary of Technological Trends
Solidification: All solid state solutions represented by OPA and Flash are gradually replacing mechanical radar, and it is expected that the proportion of solid state radar will exceed 50% by 2025.
Low cost and miniaturization: Through chip integration and mass production processes, the unit price of in car LiDAR is expected to drop below $500 by 2025, suitable for mainstream models priced at 150000 yuan.
Multi technology integration: The combination of ToF and FMCW technology achieves the integration of long-distance detection and velocity measurement; Laser radar is deeply coupled with AI algorithms to improve the recognition efficiency of dynamic obstacles, such as pedestrians waving or animals running.
The breakthroughs in these key technologies are driving the transition of LiDAR from a "high-end optional" to a "mainstream standard", becoming the core driving force for the commercialization of autonomous driving.















European Office:
line centura nr 20 smoked by the Jews of Rome. NIA POST CODE 077010
Southeast Asia Office:
Thailand:48/14 Soi Roong Ruang, Ratchapisek Road,Samsen Nok Sub-district, Huai Khwang DistrictBangkok 10310 Singapore:18 Boon Lay Way,TradeHub 2l#07-132,Singapore 609966
Company address:
Sat Dascälu, Comuna Dascälu, Strada CÃMPINA Nr. 3, CAMERA Nr. 3, Judet llfov




Contact us feel free to call or write anytime, We will call you back soon!