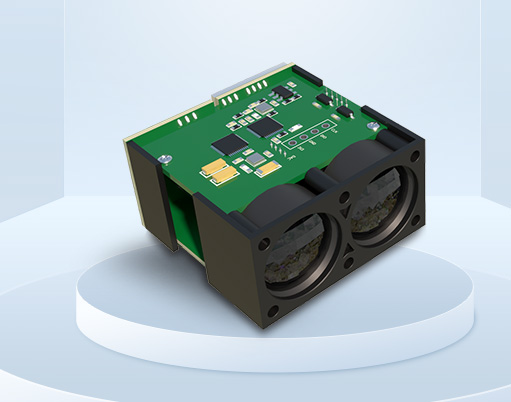
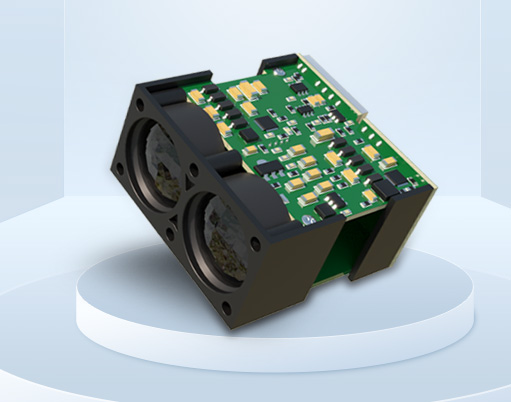
The laser radar in the autonomous vehicle is one of the core sensors to realize environment perception. It builds a three-dimensional model of the surrounding environment by emitting lasers and receiving reflected signals, providing key data support for vehicle decision-making. The following provides a detailed analysis from the aspects of technical principles, core advantages, key technologies, and development trends:
1、 Technical principle: From laser emission to 3D modeling
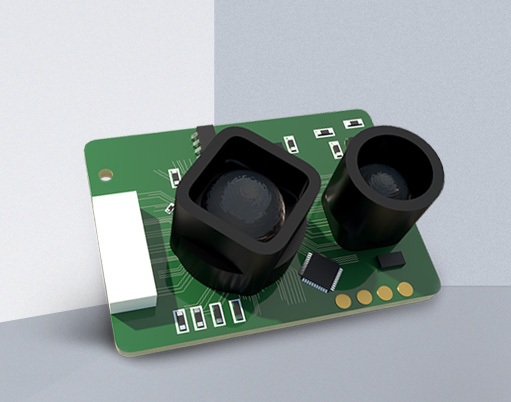
Laser emission and scanning
High power pulsed laser is emitted through a laser emitter (such as a semiconductor laser), with wavelengths mostly at 905nm or 1550nm (1550nm is safer for the human eye and has a longer detection range).
Using mechanical rotating components (such as rotating prisms and galvanometers) or electronic scanning techniques (such as phased arrays and MEMS micro galvanometers) to control the direction of the laser beam, achieving 360 ° scanning.
Echo reception and processing
The receiver (such as APD, SPAD) captures the laser reflection signal and calculates the target distance by measuring the time of flight (ToF) or phase difference of the light.
Millions of 3D points (point clouds) can be generated per second, constructing information such as distance, shape, and material of the environment.
2、 Key technology: Breaking through performance and cost bottlenecks
1. Scanning technology: from mechanical to solid-state
Mechanical rotary type: It achieves 360 ° scanning through physical rotation, with mature technology but large size, short lifespan (about 10000 hours), and high cost (early unit price exceeded 10000 US dollars).
Semi solid state (MEMS galvanometer, prism scanning): Only some components are micro moved, the volume is reduced, and the cost is reduced to thousands of dollars, such as Hesei AT128 and Livox Horizon.
All solid state (phased array, Flash LiDAR): No physical moving parts, high reliability, suitable for automotive grade integration (such as Innovusion, Huawei 96 line radar), but long-range resolution needs to be improved.
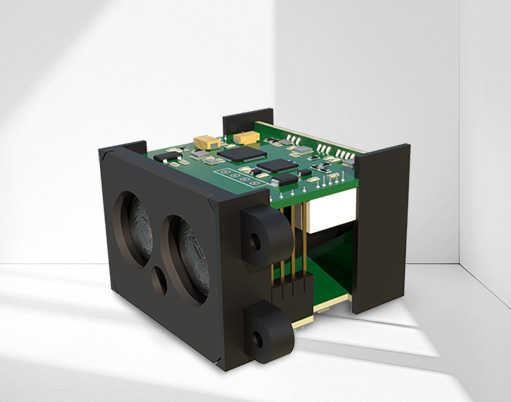
2. Laser emission and reception optimization
High power laser source: using fiber laser (1550nm) to enhance detection distance while avoiding eye damage (safety Class 1 level).
Array reception: Multi channel receivers (such as 128 channels) process signals in parallel to increase point cloud density and frame rate (such as above 10Hz).
3. Point cloud algorithm and data fusion
Noise reduction and clustering: Using filtering algorithms such as voxel filtering and statistical filtering to remove environmental noise and identify targets such as vehicles and pedestrians.
Multi sensor fusion: complementary with camera and millimeter wave radar data (such as laser radar filling the blind spot of the camera at night, millimeter wave radar penetrating rain and fog), improving decision-making reliability.
3、 Challenges and Development Trends of Vehicle Regulations
1. Core challenges
Cost control: Mechanical LiDAR used to account for 40% of the hardware cost of autonomous driving, and it needs to be reduced to below $500 through solid-state and mass production (such as chip integration).
Reliability: It needs to pass temperature testing of -40 ℃~85 ℃ and vibration testing (such as ISO 16750 standard) to adapt to the vehicle environment.
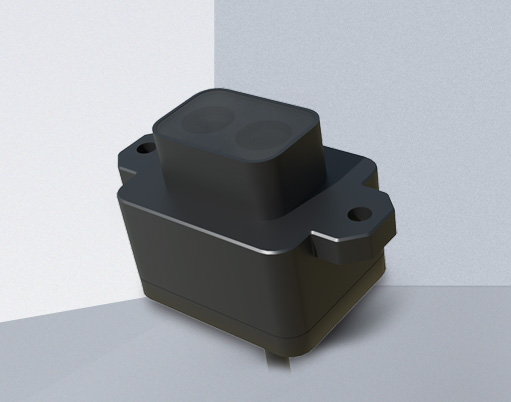
Volume and integration: It needs to be embedded in positions such as the roof and bumper, with a thickness of less than 10cm (such as DJI Livox Avia).
2. Technological Trends
Solid state popularization: The market share of all solid state LiDAR is expected to exceed 30% by 2025, and manufacturers such as Huawei and Innovusion have launched vehicle grade solutions.
Wavelength upgrade: 1550nm LiDAR has increased penetration rate in high-speed scenarios (such as autonomous driving on highways) due to its longer detection range.
Chip based integration: Integrating transmission, reception, and signal processing into ASIC chips (such as the Velodyne Vella series) to reduce size and power consumption.
4、 Typical application scenarios
High speed autonomous driving: Long distance detection (>200 meters) to avoid sudden braking of the preceding vehicle and road obstacles in advance, such as Tesla FSD and Xiaopeng XNGP.
Complex urban road conditions: high-resolution point cloud recognition of irregular targets such as pedestrians, bicycles, and traffic cones, supporting automatic parking and intersection traffic.
Assistance in harsh environment: visual sensor capability is supplemented in dark night, tunnel, rainstorm and other scenes, such as Waymo unmanned vehicle equipped with laser radar as standard.
Lidar, with its high-precision and long-distance three-dimensional perception capability, has become a key sensor for L3 and above autonomous driving. With breakthroughs in solid-state and chip based technologies, its cost and reliability are gradually meeting the requirements of automotive regulations. In the future, it will work together with multi-sensor fusion solutions to promote the commercialization of autonomous driving.














European Office:
line centura nr 20 smoked by the Jews of Rome. NIA POST CODE 077010
Southeast Asia Office:
Thailand:48/14 Soi Roong Ruang, Ratchapisek Road,Samsen Nok Sub-district, Huai Khwang DistrictBangkok 10310 Singapore:18 Boon Lay Way,TradeHub 2l#07-132,Singapore 609966
Company address:
Sat Dascälu, Comuna Dascälu, Strada CÃMPINA Nr. 3, CAMERA Nr. 3, Judet llfov




Contact us feel free to call or write anytime, We will call you back soon!