The working principle of a laser ranging sensor is to measure the distance between the sensor and an object using a laser. The following is a detailed breakdown of its working principle and process:
1. Basic working principle
According to the type of sensor, the sensor operates based on the Time of Flight (ToF) principle or triangulation principle. Both methods use laser as a reference to calculate distance.
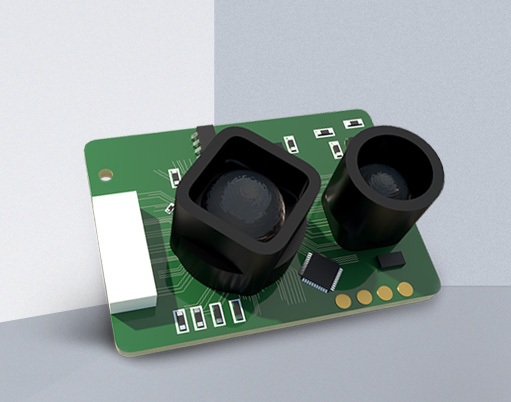
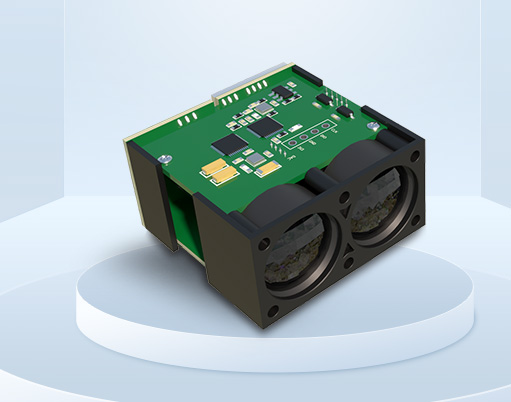
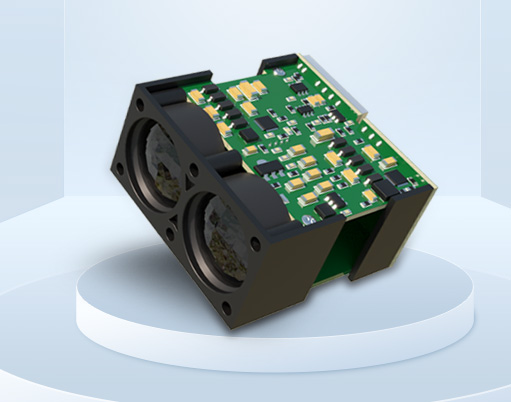
2. Key components
Laser emitter: emits a focused laser beam.
Receiver (photodetector): detects the laser reflected back from an object.
Processor: Calculate distance based on received signals.
3. Workflow divided by type
A. Time of Flight (ToF) Sensor
This is the most common type of long-distance measurement:
Laser emission: The sensor emits short pulse laser towards the target object.
Light reflection: The laser beam is irradiated onto an object and reflected back to the sensor.
Time measurement: The processor measures the time required for light to travel from the emitter to the object and back again (round-trip time, Δ t).
Distance calculation: Since the speed of light (c ≈ 3 × 10 ⁸ meters/second) is known, the distance (d) is calculated using the following formula: \ [d=\ frac {c \ times \ Delta t} {2} \] (divided by 2 to indicate round-trip time)
B. Triangular measurement sensor
This type is typically used for shorter distances and higher accuracy:
Laser projection: The sensor emits a laser beam at a fixed angle towards the target.
Spot detection: Reflected light forms a spot on a receiver (e.g. charge coupled device, CCD).
Geometric calculation: The distance is determined by the position of the light spot on the receiver using triangulation. The key variables include:
The known distance between the transmitter and receiver.
The angle of laser emission.
The angle at which the reflected light shines on the receiver.
Formula example: For a triangle formed by a transmitter, receiver, and target, the sine theorem or similar triangle theorem can be used to calculate the distance (d).
4. Other technical details
Modulation (for ToF sensors): Some sensors modulate the laser (e.g. using sine waves) and measure the phase shift between the transmitted and received signals, which is more accurate for short distance measurements.
Aperture and focal length: The laser beam is focused into a small point to improve accuracy, while the receiver has a narrow field of view and can only detect the reflected light of the target.
Noise reduction: The processor filters out ambient light and other interference to ensure that the detected signal comes from the laser.
5. Application
Architecture and Engineering: Measuring room dimensions, building heights, or distances between buildings.
Robots and Automation: Obstacle Detection, Navigation, and Object Localization.
Industrial quality control: checking the thickness of materials or the distance between components.
Consumer electronics products: smartphones (for AR applications), laser rangefinders, and home automation devices.
6. Advantages and limitations
Advantages: High precision (usually in millimeters), fast measurement speed, and the ability to measure long distances (some industrial models can measure distances of several kilometers).
limitations:
A reflective surface is required; Low reflectivity objects (such as black or rough surfaces) can reduce accuracy.
Direct sunlight or strong ambient light can interfere with the receiver.
In rainy or dusty environments, laser beams may scatter, affecting measurements.
7. Example:
Working principle of handheld laser rangefinder
Press the button to emit laser towards the target (such as a wall).
The sensor measures the time it takes for the laser to reflect back.
The distance calculated using the ToF formula is displayed on the screen.
By combining laser technology with precise timing or geometric calculations, these sensors can provide accurate distance measurements for various applications.


European Office:
line centura nr 20 smoked by the Jews of Rome. NIA POST CODE 077010
Southeast Asia Office:
Thailand:48/14 Soi Roong Ruang, Ratchapisek Road,Samsen Nok Sub-district, Huai Khwang DistrictBangkok 10310 Singapore:18 Boon Lay Way,TradeHub 2l#07-132,Singapore 609966
Company address:
Sat Dascälu, Comuna Dascälu, Strada CÃMPINA Nr. 3, CAMERA Nr. 3, Judet llfov




Contact us feel free to call or write anytime, We will call you back soon!